摘要:为解决智能土方机械的综合性能评价问题,促进智能化土方机械产品质量提升,运用层次分析法———模糊综合评价法,提出了完善的综合性能评估体系框架及其数学模型。并以典型的智能土方机械产品XG958i智能装载机为例,结合主要的因素进行分析,采用AHP确定了其不同指标的权重系数,并从安全性能、作业性能、控制系统和智能化行为4个评估方案层,评价了该机型的综合性能。运用此方法可较为准确地对智能土方土方机械的综合性能进行评定,评价结果科学可靠,为智能土方机械产品质质量提升提供科学依据。 关键词:智能装载机;层次分析法;模糊综合评价法,性能评价 0 引言 随着互联网技术及人工智能技术的迅猛发展,信息化和机械化得融合越来越紧密,传统机械工业也正迎来智能化的升华和质变。作为机械工业的重要分支,土方机械行业也是如此,智能化已经成为一种明显的趋势。近年来一些土方机械已经逐步具备了智能化,如:山推土方机械股份有限公司无人推土机;厦工的自动找平及远程控制的智能平地机,三一集合自动作业规划及远程遥控功能的智能挖掘机[1];山特维克地下自主导航铲运机等产品(见图1~4)。这些产品的特点是:具有环境感知、工作状态识别、地图构建、远程控制、机电系统高度集成以及自学习功能的控制系统。   图1 山推DE17R无人驾驶推土机 图2厦工XG3220Ci智能平地机 图1 山推DE17R无人驾驶推土机 图2厦工XG3220Ci智能平地机
图3三一SY365A•I智能挖掘机 图04 山特维克地下LD204自主导航铲运机 智能化土方机械改变了传统土方机械生产效率低下、技术含量低等弊端,最大程度上发挥机械性能,提高作业效率,减少工程项目对人力的依赖,大大提高土方机械项目施工效率。但是由于试验方法及标准体系缺乏,导致土方机械智能运行的安全水平、性能水平和智能化水平等综合性能难于评价,并且其行为技术可能对人类及环境造成影响也难以评定。因此本文构建以智能装载机为例构建了智能土方机械的评估体系框架,运用层次分析法对智能土方机械综合性能指标的权重进行确定,结合模糊综合评价法对智能土方机械综合性能的不同指标进行评估,将原本性能评价转化为定量分析,通过构建模型和计算,可以得出土方机械的综合性能情况,对国内设计、研究、评价智能土方机械具有指导意义。 1 AHP-FCE 综合评判法 针对某个产品或项目开展综合评价,经常涉及到一些难以客观量化的指标,本文涉及到的评价就属于此类需要采用定性与定量相结合的问题,为此采用层次分析法[2,3](AHP)与模糊综合评判法[4,5](FCE)来进行智能土方机械性能的分析研究,AHP-FCE模型基本流程如图5所示: 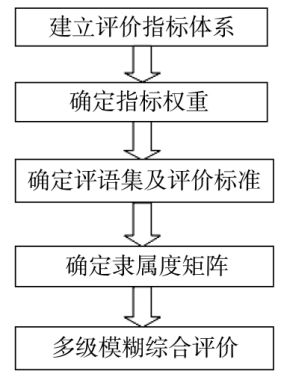
图5 层次分析法的基本流程 1.1 基于AHP确定评价指标权重 确定各级指标的权重是对产品进行综合性能评估的基础,应用层次分析法(AHP)评价体系,确定指标权重步骤如下: 1)完成对所评价项目的层次结构的建立。根据评价系框架依次建立1级、2级和3级指标层。 2)确定判断矩阵并对结构层次排序进行分析决策。层次分析法参照Saaty确定的比较尺度表(见表1)对每1层指标层的各指标进行两两比较,构造判断矩阵。 表1比较尺度 
| 两目标相比 | 1 | 2个目标 和 和 同样重要 同样重要 | 3 | 目标比目标稍微重要 | 5 | 目标比目标明显重要 | 7 | 目标比目标强烈重要 | 9 | 目标比目标极端重要 | 2,4,6,8 | 介于以上相邻两种情况之间 | 以上各数的倒数 | 2个目标反过来进行比较 | 3)层次单排序及一致性检验。计算判断矩阵对应的最大特征值  和对应的特征向量 和对应的特征向量 。计算判断矩阵的一致性指标 。计算判断矩阵的一致性指标 如式(1)所示: 如式(1)所示:  (1) (1)
式中:是判断矩阵的最大特征值; 是矩阵的阶数。 是矩阵的阶数。 最后根据平均随机一致性指标表计算判断矩阵的一致性比率 如式(2)所示: 如式(2)所示:  (2) (2)
式中,是判定矩阵的一致性指标; 是判定矩阵的平均随机一致性指标,当 是判定矩阵的平均随机一致性指标,当 可通过表2查得。 可通过表2查得。 表2 平均随机一致性指标 阶数 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 0 | 0 | 0.58 | 0.90 | 1.12 | 1.24 | 1.31 | 1.41 | 1.45 | 2 模糊综合评价(FCE)模型 评价中一般无法量化的指标采用一些模糊概念比如:好、中、差三个等级进行衡量。模糊评价的一般步骤为: 1)确定评判指标集:智能土方机械的评价指标集合为: ; ; 2)确定评价集:评价集是根据某一评判因素作出的优劣好坏的定性评价,设评价集为: ; ; 3)建立模糊评判矩阵:单指标评判矩阵是指以各单指标评判集的隶属度为行组成的矩阵:  (3) (3)
4)多级模糊综合评价:模糊综合评价是一个多级逆推的过程,根据指标集的指标权重向量 与单指标评判矩阵 与单指标评判矩阵 合成为矩阵 合成为矩阵 ,即可得到目标层的综合评定矩阵。 ,即可得到目标层的综合评定矩阵。  (4) (4)
3 基于AHP-FCE智能土方机械综合性能评价 3.1 综合评价体系模型建立 为使评价智能土方机械的综合性能所进行的评价模型设计得科学严谨,需要充分考虑到土方机械的智能化程度、作业性能、安全性能,部分指标不能完全量化且无法简单地描述其优劣性,因此,需要构建AHP-FCE综合评价模型解决上述问题。 结合AHP层次分析方法,将智能土方机械进行科学的层次的划分,再依此建立体系框架,如图6所示。在智能土方机械性能评价过程中,将智能土方机械性能分为几个子系统:安全性能、作业性能、控制系统、智能化行为。根据每个产品的性能不同,计算得单个功能的性能评价值,进一步得到子系统的性能评价值,最后通过权重得到整机的性能评价值。土方机械综合性能评价的层次结构图最上层为智能土方机械综合性能,准则层有4个指标,分别为:安全性能、作业性能、控制系统和智能化行为,最底层也为方案层。 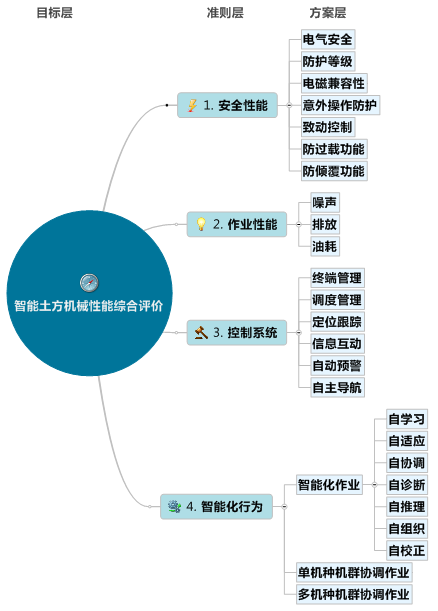
图6 智能土方机械综合性能评价层次结构图 本文选取一款典型的土方机械产品-厦工品牌的XG958i智能装载机进行评价,该产品基本性能参数见表3所示。 表3 厦工XG958i智能装载机部分性能参数 指标 | 指标描述 | 铲斗容量/m3 | 2.7 | 额定载荷/kg | 5000 | 操作质量/kg | 17500 | 爬坡能力/° | 28 | 速度/km/h | 0-38 | 最大牵引力/kN | 155 | 3.1.1 评价指标的含义 安全性能:反映智能土方机械基本安全指标及人机工程设计,主要涵盖:电气安全、防护等级、电磁兼容性、意外操作防护、致动控制、防过载功能、防倾覆功能。 作业性能:反映智能土方机械在执行作业任务的过程的核心指标,主要涵盖:噪声、排放、油耗,这些指标也是作为土方机械设计过程中的重要参考指标。 控制系统:反映智能土方机械在执行作业任务的过程的信息化控制模块的功能,主要涵盖:终端管理、调度管理、定位跟踪、信息互动、自动预警自主导航智能控制模块性能指标。 智能化行为:主要涵盖反映人工智能作业能力(自学习、自适应、自协调、自诊断、自推理、自组织、自校正)、单机种机群协调作业能力、多机种机群协调作业能力。 3.2 层次分析法指标权重的计算 根据图6的层次结构,经过项目组专家调研及讨论,并结合表1相关指标的比较尺度值,可以分别得到XG958i智能装载机综合性能在单一准则下,下层对上层指标的权重数值,然后完成一致性检验,判断矩阵及结果如下:  判断矩阵: 判断矩阵:  (5) (5)
 判断矩阵 判断矩阵  (6) (6)
 判断矩阵 判断矩阵  (7) (7)
 判断矩阵 判断矩阵  (8) (8)
 判断矩阵 判断矩阵  (9) (9)
最终,计算得到各指标权重及其一致性检验结果,如表4所示。由表4可见,每个矩阵的值代表指标层对准则层的指标权重结果大小情况,均<0.10。可见,一致性检验均通过。 利用上面的评价体系框架的数学模型及方法,对XG958i智能装载机综合性能进行评价,得出各个指标的组合权重如表5所示。 表4 指标权重及其一致性检验 
表5 各指标的组合权重 因素 | 
| 
| 
| 
| 
| 
| 总权重 | 0.0197 | 0.0791 | 0.0197 | 0.0433 | 0.0433 | 0.0545 | 
| 
| 
| 
| 
| 
| 
| 0.0922 | 0.0262 | 0.0999 | 0.1911 | 0.0198 | 0.1587 | 0.0712 | 
| 
| 
| 
| 
| 
| | 0.1377 | 0.0790 | 0.0398 | 0.0043 | 0.0106 | 0.0259 | | 由于总排序随机一致性比例为: 
则计算得出 ,表明通过一致性检验。 ,表明通过一致性检验。 3.3 模糊综合评价法 3.2节采用层次分析法(AHP)论述并计算得出各评价指标的权重分配,然后应用隶属度函数[6]和统计方法,可进一步计算出各个评价指标对于评价集的3级指标隶属度,得出对应评价体系评语集的隶属度矩阵: 安全性能:  (10) (10)
作业性能:  (11) (11)
控制系统:  (12) (12)
智能化行为:  (13) (13)
最后采用模糊运算,从底层依次向上作模糊综合评价,将表4中对应的权重向量与各个指标的模糊隶属度矩阵相乘,可计算得到准则层的隶属度矩阵为: 
最终计算得出目标层的综合评定矩阵: 
评价结果表明,XG958i智能装载机的综合性能有“16.63%”的概率属于“差”这一质量等级,有“43.34%”的概率归属于“中”这一质量等级,“40.03%”的概率属于“好”这一质量等级。采用最大隶属度原则,该产品最大可能性结果“43.34%”作为最终评定结果,即“中”这一质量等级作为产品的最终质量评价结果。 4 结论 本文结合层次分析法(AHP)---模糊综合评价(FCE),对智能土方机械产品质量评价构建了科学而完善的3级指标评价体系。运用该方法,能科学地完成该类产品的定量综合评估,为智能化土方机械产品的质量改进及提升提供科学依据。同时,针对具体智能化机型XG958i智能装载机开展了综合性能评价,通过计算得出的评定矩阵,评估该产品处于中等质量水平。 参考文献: [1]工程机械智能化进展与发展趋势[J]. 杨华勇.建设机械技术与管理. 2017(12). [2]管理信息系统的模糊综合评价模型研究[J]. 李煜华.哈尔滨工业大学学报. 2004(08) [3]基于层次分析法的汽车设计方案评价模型[J]. 康辉,赵凯勋.包装工程. 2014(22) [4]基于模糊一致矩阵的模糊层次分析法的排序[J]. 吕跃进.模糊系统与数学. 2002(02) [5]模糊综合评价中几类模糊算子的比较[J]. 张倩,王学平.模糊系统与数学. 2016(03) [6]基于层次分析法和相关性矩阵的先进设计技术分类方法[J]. 郭弘凌,田怀文,柯小甜.机械设计与研究. 2016(01) |